
Torno-Fresa avanzado
Máquina de decoletaje y MTM (Máquinas multi-tarea) con sincronización
Consiga fácilmente trayectorias de mecanizado con SprutCAM
En SprutCAM, obtiene la primera trayectoria sin configurar ningún parámetro. Después de eso, puede jugar con los parámetros, controlando visualmente el resultado.
 |
 |
 |
 |
|||||
| Importar geometría | Seleccionar la estrategia | Ejecutar | Ver la trayectoria |
Nomura NN32Y-B2 programada en SprutCAM X

Cálculo de trayectorias de decoletaje y simulación de mecanizado

La simulación muestra todas las piezas móviles complejas sin excepciones y proporciona al usuario un control de colisión adecuado.

Mecanizado de decoletaje con doble husillo
Características de multicanal
Sincronización, optimización de tiempo de máquina, simulación, operaciones auxiliares
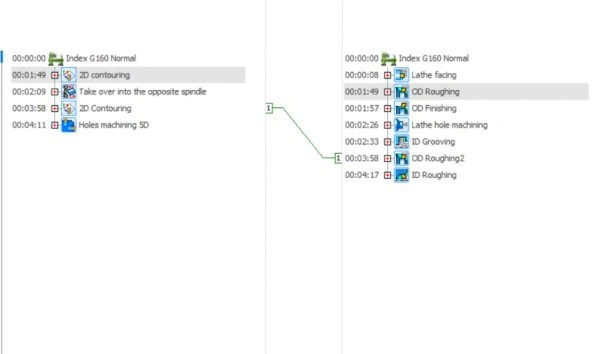
Configuración de puntos de sincronización
Cada nodo MTM trabaja con un controlador/canal separado, utilizando su propio programa. Por lo tanto, es necesario crear un código NC para cada controlador/canal de máquina.
Estos programas requieren sincronización; es necesario hacer una pausa. SprutCAM tiene la función de configuración de puntos de sincronización para este propósito. Los puntos de sincronización se pueden colocar en cualquier parte del código NC.
Configuración de puntos de sincronización
Optimización del tiempo de la máquina |
Evaluación y ajuste de carga en cada uno de los canales de control. Distribución del trabajo entre canales. |
Cálculo y simulación de trayectorias |
Esquemas cinemáticos de máquina con varios componentes, fijaciones de piezas y posibilidad de distribución de ejes entre varios canales. |
Operaciones auxiliares |
Progración de carga, descarga y cambio de husillo. |
Ejemplos de mecanizado multicanal

Mecanizado sincronizado de husillo y contrahusillo con toma de control

Torneado sincronizado con 2 herramientas a la vez

Programación automática de alimentación
El torno CNC y el robot industrial trabajan juntos. El robot carga, gira y descarga la pieza de trabajo. El torno funciona según su código NC. La máquina y el robot están sincronizados. Todo el proceso está programado en SprutCAM.
Control de colisión durante el cálculo de la trayectoria
SprutCAM tiene en cuenta las limitaciones cinemáticas de la máquina real para el cálculo inicial de la trayectoria. No hay necesidad de posprocesamiento y simulación separada para el control de límites de ejes y colisiones.



Instale SprutCAM X
Soluciones de programación de máquinas CNC y robots industriales
Explore otras soluciones de programación de máquinas CNC y robots industriales proporcionadas por SprutCAM



















